
Пользователям цифровых нефотограмметрических камер известно, что изображения объектов на снимках довольно сильно искажены, особенно, если они получены при минимальном фокусе трансфокаторного объектива (рис.1).
Для использования указанных камер в инженерной фотограмметрии необходимо не только определить элементы внутреннего ориентирования f, x0, y0, но и установить величину смещения δri (δxi, δyi) каждой точки снимка от центральной проекции. Выполнить это можно путем калибровки камер.
Разработано достаточно много технологий ее выполнения (например, [1,2]). Для цифровых камер широко используется метод непосредственного линейного трансформирования (НЛТ, DLT - Direct Linear Transformation), в основу которого положены известные уравнения коллинеарности.
On digital camera calibration
It has been found that the distortion of digital images depends on the focal length of the camera's lens. The distortion is especially great when the focal length is the smallest (7.1 mm). The most efficient technique for correcting the images geometry involves using the calibration module of RxSpotlight PRO Version 6.0.458 by Microsoft Corporation. It allows increasing the object positioning accuracy manyfold.
В современных программных продуктах (пример PhotoModeler) для этого есть соответствующий модуль. Учитывая, что у некоторых цифровых фотограмметрических станций вариант определения элементов внутреннего ориентирования предусмотрен (например, PHOTOMOD SP), возникает соблазн калибровку свести только к исправлению геометрии изображений.
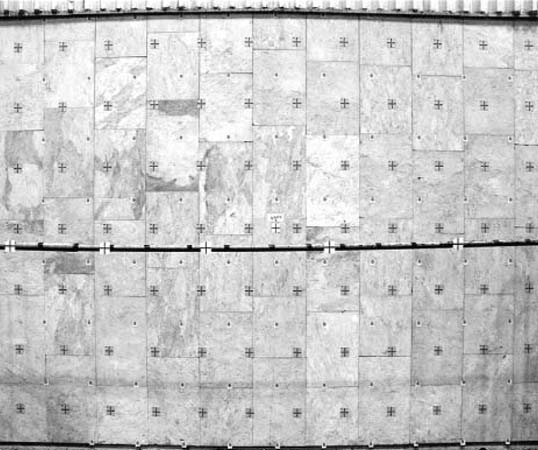 Рис. 1.
Рис. 1.
Искажение прямоугольной сетки
Сделать это можно, например, по фотографии достаточно точной плоской сетки прямоугольников, при условии, что главный луч при фотографировании расположен перпендикулярно к ней.
С этой целью создан тест-объект с марками, закрепленными на вертикальной стенке (рис.2).
Часть из них (три группы точек, смещенных относительно друг друга) расположены регулярно. Причем в одной из групп они имеют вид черных крестов на светлом фоне (7 рядов по 12 марок в каждом). В другой группе 8 таких рядов (96 марок в виде концентрических окружностей). Каждая из групп образует сеть прямоугольников со сторонами 358×406 мм.
Третья группа марок (белые кресты на черном фоне) добавлена к первым двум для того, чтобы при изучении искажений цифровых снимков можно было оценить возможности модуля PHOTOMOD ScanCorrect. Она образует сеть квадратов со сторонами приблизительно 360 мм. В ней 8 рядов по 12 марок в каждом. Закреплялись марки и в других местах стенки, а также вне плоскости стены, на штангах и различного типа стойках (рис.2).
 Рис. 2.
Рис. 2.
Расположение марок тест-объекта
Определение координат марок (контроль их перемещения в заданное положение) выполнено мультитеодолитной координатоопределяющей системой Leica AXYZ MTM. Система координат правая. За начало принята точка, закрепленная на стене в левом нижнем углу тест-объекта. С плоскостью стены были совмещены оси X (горизонтально вправо вдоль стены) и Z вертикально (рис.2). Анализ показал, что средняя квадратическая ошибка установки марок в заданное положение по осям координат оказалась равной 0,3 мм, а ошибка определения их координат – 0,1 мм.
Выполнено фотографирование тест-объекта цифровой 8 мегапиксельной (3264×2448) камерой SONY DSC F828. Размер ее ПЗС матрицы 11 мм (6,6×8,8 мм), размер пикселя приблизительно 2,7 мкм. Объектив Варио-Зоннар-Карл Цейсс Т трансфокаторный семикратный с минимальным фокусным расстоянием – 7,1 мм, при этом возможна ручная установка параметров фотографирования. Фокусировка при фотографировании во всех случаях устанавливалась на бесконечность.
Первая серия снимков получена с отстояний 3,6 м и 7,2 м при установке фокусного расстояния объектива 7,1 мм и 14,2 мм соответственно и при условии перпендикулярности к плоскости сетки (в ее центральной точке) оптической оси. Именно эти снимки и предназначались для оценки геометрических искажений и технологии их устранения.
Вторая серия – это снимки, образующие пары нормального и конвергентного случаев съемки. Они получены с тех же отстояний, но с базисов длиной около 1 - 2 м, и предназначались для оценки эффективности рассматриваемой технологии калибровки.
Вначале построение полей искажений предполагалось выполнить с помощью модуля ScanCorrect цифровой фотограмметрической станции PHOTOMOD. (Вообще указанный модуль создан для исключения смещений точек снимка, которые появляются в процессе сканирования аналоговых изображений на полиграфических сканерах.) Такие поля были построены для снимков с минимальным (7,1 мм) и удвоенным (14,2 мм) фокусным расстоянием. Заметим, что в первом случае изображение было искажено настолько, что программа отыскала только треть крестов. Остальные пришлось вводить вручную, при этом величины искажений достигали нескольких десятков пикселей.
Качество учета искажений оценено путем сравнения невязок на замаркированных точках (опознаках), расположенных как в плоскости стены, так и на ближнем плане. Для этого, используя построенные поля, были исправлены (трансформированы) снимки, составляющие стереопары, а затем на цифровой фотограмметрической станции выполнено построение и внешнее ориентирование моделей по исправленным и неисправленным снимкам.
Использовать для этой цели можно любую ЦФС, но предпочтение отдано программному продукту PHOTOMOD SP фирмы Ракурс. Она хорошо себя показала при обработке наземных снимков, а при достаточном числе опознаков позволяет оценивать значения элементов внутреннего ориентирования и других параметров, надежно работает коррелятор.
Сравнение невязок на опознаках показало, что улучшение результатов происходит только для снимков с фокусным расстоянием 14,2 мм, имеющих небольшие искажения (табл.1), а для снимков с минимальным фокусным расстоянием невязки на опорных точках даже возросли, причем существенно.
Таблица 1
Невязки на опознаках для снимков с разными параметрами съемки и обработки
| № снимков |
Параметры съемки |
Среднеквадратические невязки по осям координат, мм |
| Снимки неисправленные |
Снимки исправленные |
| mx |
my |
mz |
mx |
my |
mz |
| 621-618 |
Вид конвергентный. Отстояние 7,2 м. Фокус 7,1 мм. Число опознаков - 24 |
11,8 |
8,2 |
11,7 |
22,1 |
22,2 |
15,3 |
| 619-615 |
Вид нормальный. Отстояние 7,2 м. Фокус 14,2 мм. Число опознаков - 24 |
6,0 |
21,2 |
7,3 |
2,2 |
4,5 |
1,4 |
Это означает, что модуль SсanCorrect в целом некорректно выполнил поставленную задачу, поэтому от такого варианта пришлось отказаться. Но существует достаточно большое число программных продуктов, где предусмотрено исправление растровых изображений (если они по каким либо причинам были искажены) как с помощью полиномов 2-6 степеней, так и сплайн-функции (surface splines). Одним из них является программа RxSpotlight PRO Version 6.0.458 Microsoft Corporation.
Путем использования названной программы была выполнена калибровка снимков первой серии (539, фокус 7,1 мм и 561, фокус 14,2 мм) по 163 точкам. При этом в процессе вычисления истинных координат исходили из того, что искажения возрастают от центра растра к краям, кроме того, в положение каждой точки были введены поправки за рельеф (так как отклонение марок от средней плоскости стены достигали 6 мм).
Построенные таким способом поля искажений послужили основой для исправления всех остальных снимков (первой и второй серий). Результаты обработки стереопар, составленных из исходных и исправленных снимков, представлены в табл.2.
Таблица 2
Результаты обработки стереопар из исходных и исправленных снимков
| № снимков |
Параметры съемки |
Режимы обработки |
Невязки по осям координат, мм |
| Снимки исходные |
Снимки исправленные |
| mx |
my |
mz |
mx |
my |
mz |
| 548-539 |
Вид нормальный, отст. 3,6 м, фокус 7,1 мм, число опозн. - 21 |
Cплайн, определен. ЭВO |
11,1 |
36,5 |
5,5 |
0,2 |
0,9 |
1,0 |
| Сплайн, править все |
5,0 |
22,1 |
2,9 |
0,1 |
0,8 |
0,2 |
| 539-550 |
Вид конвергентый, отст. 3,6 м, фокус 7,1 мм, число опозн. - 23 |
Сплайн, определен. ЭВО |
13,9 |
19,8 |
10,1 |
1,8 |
1,4 |
1,0 |
| 568-557 |
Вид нормальный, отст. 7,2 м, фокус 7,1 мм, число опозн. - 21 |
Сплайн, определен. ЭВО |
17,6 |
63,1 |
6,3 |
0,9 |
2,4 |
1,8 |
| Сплайн, править все |
10,3 |
49,8 |
3,9 |
0,7 |
2,2 |
0,4 |
| 570-557 |
Вид конвергентый, отст. 7,2 м, фокус 7,1 мм, число опозн. - 21 |
Полином 6 степени, определен. ЭВО |
22,0 |
8,2 |
13,9 |
2,1 |
3,1 |
1,4 |
| 621-618 |
Вид конвергентый, отст. 7,2 м, фокус 7,1 мм, число опозн. - 24 |
Сплайн, определен. ЭВО |
11,8 |
8,2 |
1,7 |
1,4 |
2,6 |
1,3 |
| Сплайн, править все |
0,6 |
1,0 |
0,5 |
Примечание. «Править все» означает использовать предоставляемую программой PHOTOMOD SP возможность уточнять элементы внутреннего ориентирования и соотношение масштабов по осям координат в процессе построения модели; в режиме определения ЭВО разность масштабов по осям координат не учитывается.
На основании полученных результатов можно сделать следующие выводы:
1. Искажения цифровых снимков зависят от величины фокусного расстояния объектива фотокамеры, и они особенно велики при его минимальном значении (7,1 мм).
2. Поле искажений цифрового изображения, построенное с помощью модуля PHOTOMOD ScanCorrect, отличается от реального. Это особенно заметно, когда смещения точек на снимке велики. Поэтому исправление изображений по построенному полю в общем случае не дает удовлетворительных результатов.
3. Более эффективна технология исправления геометрии снимков с помощью модуля калибровки программы RxSpotlight PRO Version 6.0.458 Microsoft Corporation. Точность определения координат точек объекта в этом случае можно повысить во много раз. При этом можно использовать как сплайн-функции, так и полиномы 6 степени.



