В пределах материковой части Арктики располагаются уникальные запасы и прогнозные ресурсы медно-никелевых руд, олова, платиноидов, агрохимических руд, редких металлов и редкоземельных элементов, крупные - золота, алмазов, вольфрама, ртути, черных металлов, оптического сырья и поделочных камней.
The classification of the mining methods used at flooded, offshore and aquatic area fields in the arctic zone
Based on the survey information, the authors propose a classification of the mining methods used at flooded, offshore and aquatic area fields in the Arctic zone
Основные ресурсы минерального сырья Арктики сосредоточены в северных частях Кольской, Таймыро-Норильской, Маймеча-Котуйской и Уджинской, Таймыро-Североземельской, Анабарской и Якутской, Верхоянской и Яно-Чукотской провинциях [2].
На шельфе и арктических архипелагах установлены запасы и прогнозные ресурсы всех категорий россыпного олова, золота, алмазов, марганца, полиметаллов, серебра, флюорита, поделочных камней, различных самоцветов. Имеются предпосылки открытия месторождений эндогенного золота, редкометальных элементов, меди, фосфоритов, железа и ряда других полезных ископаемых [2].
Таким образом, территории и акватории Арктики характеризуются огромными ресурсами минерального сырья, поэтому необходимо тщательное изучение, систематизация и обобщение природных, горно-геологических и горнотехнических условий эксплуатации обводненных, прибрежных и акваториальных месторождений.
Основные направления совершенствования технологии разработки обводненных, прибрежных и акваториальных месторождений арктической зоны заключаются в выборе технологии разработки по классификационным признакам, учитывающим условия эксплуатации месторождений: без осушения и с осушением (рис.1).
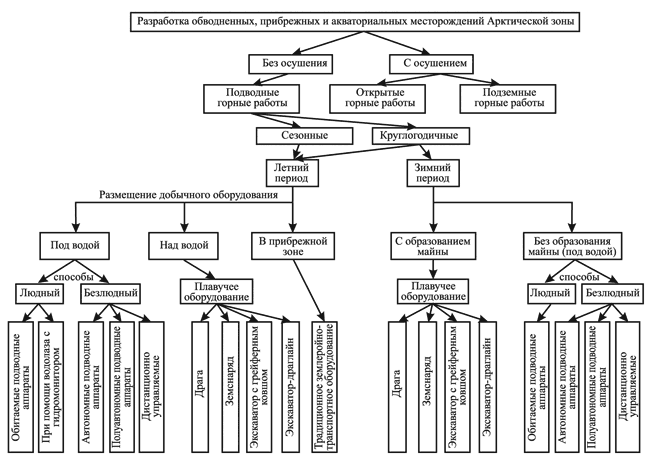 Рис. 1.
Рис. 1.
Разработка обводненных, прибрежных и акваториальных месторождений Арктической зоны
В том случае, если месторождение осушается, то его разработку осуществляют открытым, либо подземным способом. В том случае, когда разработка обводненных, прибрежных и акваториальных месторождений по горнотехническим условиям проводится без осушения, необходимы подводные горные работы.
Месторождения могут разрабатываться сезонно, с продлением сезона добычных работ или круглогодично. В данном случае размещение добычного оборудования осуществляют под водой, над водой, либо в прибрежной зоне в летних условиях, а в зимнее время - подо льдом.
При размещении добычного оборудования под водой существует два способа разработки: людный и безлюдный.
К людному способу разработки относятся обитаемые подводные аппараты и разработка подводного грунта с помощью водолаза с использованием гидромониторной струи. В связи с большим разнообразием подводные аппараты можно классифицировать, например, в зависимости от глубины погружения, на три группы. К первой группе относятся наиболее многочисленные аппараты для работ на континентальном шельфе с глубиной погружения до 1000 м. Ко второй - аппараты, рассчитанные на глубину 2000-4000 м и используемые в пределах материкового склона. Третья группа аппаратов предназначена для максимальных глубин [3,4].
Основными критериями сравнительной оценки подводных обитаемых аппаратов являются: рабочая глубина погружения, численность экипажа, параметры системы жизнеобеспечения, количество манипуляторов, транспортабельность. Например, аппарат PC-1202 с блочной конструкцией корпуса, снабженной водолазным отсеком и опорами регулируемой длины, используется для осмотра дна, размещения зарядов взрывчатых веществ, отбора кернов и образцов грунта, обеспечения работы электроинструментов и видеосвязи. Так, в Германии разработана обитаемая глубоководная система DSWS для производства различных подводных работ. Система состоит из подводного носителя аппаратуры и устройств UWAG, обеспечивающего буя, передающего устройства и двух сменных капсул - буровой и водолазной [5,6].
Японская фирма «Коматцу» разработала подводный бульдозер для глубин до 60 м, управление которым осуществляется либо водолазом, либо по кабелю с обеспечивающего судна. В Хьюстоне (США) переоборудован обычный гусеничный экскаватор с ковшом емкостью 0,58 м³ для рытья подводной траншеи по трассе морского выпуска сточных вод. Для механизации подводных буровых работ в Великобритании использовали гусеничную буровую установку с пневматическим приводом [3,4].
К безлюдному способу относятся автономные подводные аппараты, полуавтономные подводные аппараты и дистанционно управляемые.
Автономный необитаемый подводный аппарат (АНПА) представляет собой автоматический самоходный носитель исследовательской аппаратуры, способный погружаться в заданный район океана на глубину до 6 км, двигаться по программной траектории, выполнять требуемые работы и по окончанию программы возвращаться на обеспечивающее судно или береговую базу. АНПА работает под водой автономно, без связующего кабеля. Передача команд на борт аппарата и телеинформации обратно осуществляется с помощью гидроакустической системы связи. Гидроакустическая навигационная система совместно с интегральной бортовой навигационной системой позволяют непрерывно определять местоположение аппарата, а оператору на судне - отслеживать траекторию его движения в реальном масштабе времени. Время непрерывной работы АНПА под водой зависит от проекта аппарата, типа его энергоисточника и может составлять от единиц до нескольких десятков часов (например, автономность аппарата «Тифлонус» составляет 35 ч, «TSL» - 8 ч, «CR-01» - 10 ч, «Скат» - 4 ч, «САНПА» - неограничена) [7].
К полуавтономным подводным аппаратам относятся земснаряды, перемещающиеся по дну, соединенные гибким напорным трубопроводом (пульпопроводом) с жестким береговым [8].
К дистанционным управляемым подводным аппаратам относятся подводные бульдозеры, экскаваторы, скреперы, устройства с использованием хладагента, погружные землесосы, управление которыми осуществляется дистанционно по кабелю и по радио. Например, фирма «Коматцу» создала уже более ста бульдозеров-амфибий (скреперы-амфибии), с дизельным двигателем для строительства на мелководье. Бульдозер управляется оператором дистанционно по радио. Он контролирует положение бульдозера по длине и наклону части трубы, выступающей над поверхностью воды [3,4].
Также к этой группе относится разработанный МГИ проект плавучего земснаряда, оснащенного погружным землесосным агрегатом «Моллюск», соединенным гибким трубопроводом (пульпопроводом) длиной до 200 м, с базой земснаряда, и имеющей подледную системы канатного перемещения этого добычного органа по подводному забою [8]. В эту же группу входят плавучие платформы (например, нефтяная буровая платформа Noble Clyde Boudreaux и FLIP «перевертыш») [9,10].
К плавучему оборудованию относятся драги, земснаряды, экскаваторы с грейферным ковшом, экскаваторы-драглайны (на понтонах).
Разработку полезного ископаемого в прибрежной зоне осуществляют с помощью традиционного землеройно-транспортного оборудования (канатно-скреперные установки, скреперно-землесосные комплексы и т.д.).
Добычные работы в зимний период могут осуществляться как с образованием майны, так и без образования (подо льдом) (рис.2).
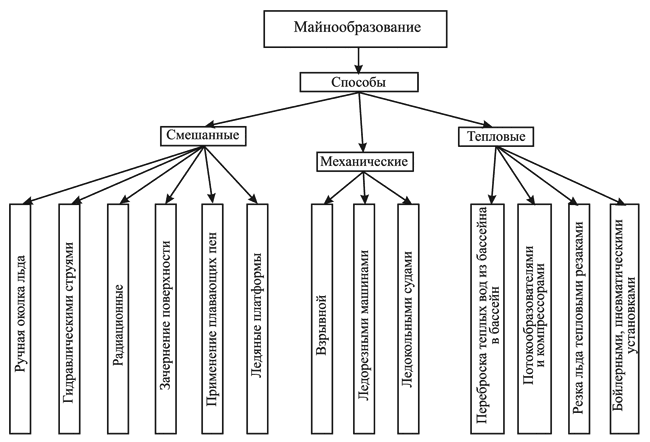 Рис. 2.
Рис. 2.
Способы образования майны
Существует три способа майнообразования: смешанные, механические и тепловые. Механические способы включают проведение ледокольных, ледорезных и взрывных работ. Тепловые - размыв льда потокообразователями и при помощи компрессоров, тепловыми резаками и бойлерными, пневматическими установками и с помощью переброски теплых вод из бассейна в бассейн («сифон»).
При смешанных способах используют радиационную оттайку путем зачернения ледяного покрова, плавающие пены, разрушающие лед напорные струи от грунтовых насосов земснарядов, ручную околку льда, а также намораживание искусственной ледяной платформы методом свободной заливки специальными насосами вокруг комплекса добычных и обогатительных судов до опускания и смерзания ее с донными породами [8].
Таким образом, перспективы развития горной промышленности Арктической зоны настоятельно требуют дальнейшего совершенствования, научного обоснования и внедрения современной технологии разработки месторождений полезных ископаемых, как в рамках описанных направлений, так и принципиально новых.




